10. This would appear to be the place to indicate the manner of constructing the projections of solids bounded by planes and rectilinear edges, but for this operation there is no general rule. One perceives, for instance, that, according to the way in which the position of the apexes of solid angles of a solid are defined, the construction of their projections can be more or less simple, and that the nature of the work must depend on the method of definition. In this respect it is like algebra, in which there is no general procedure for solving a problem in equations. In each particular case, the step depends upon the way in which the relation between the quantities given and those unknown is expressed; and it is only through varied examples that one is able to accustom beginners to see these relations and write them into equations. It is much the same for descriptive geometry. It is through numerous examples and through the use of the straight edge and compass in the classroom that one can acquire the habits of the constructions and can accustom oneself to the choice of the simplest and most elegant methods in each particular case. But also, as in analysis, when a problem is put into an equation, procedures exist for treating these equations and for deducing the unknown quantities; in the same way, in descriptive geometry, when the projections are produced, general methods exist for constructing all which results from the form and the position of bodies.
Section of the original text in French
It is not
without reason that we compare here descriptive geometry with algebra; the two
sciences have very close resemblances. There are no constructions of descriptive
geometry which cannot be translated into analysis; and when the questions have
not more than three unknowns, each analytical operation can be regarded as the
portrayal of an act in geometry.
It is
desirable that the two sciences should be cultivated together; in the most
complicated analytical operations descriptive geometry will carry that clarity
which is its very nature and, in its turn, analysis will bring to geometry that
generality which is fit and proper.
2. The surfaces of all natural bodies can be considered as made up of points, and the first step we are going to make in this treatise must be to indicate how one can express the position of a point in space.
Space is
without limit: all parts of space are alike: there is nothing characteristic
about any particular part so that it can serve as a reference for indicating
the position of a particular point.
Thus, to
define the position of a point in space it is necessary to refer this position
to those of other objects which are of known position in some distinctive part
of space, the number of objects being as many as are required to define the
point; and for the process to be amenable for easy and everyday use, it is
necessary that these objects should be the simplest possible so that their
positions can be most easily imagined.
3. Amongst all the simple objects, we
will investigate which present the most facility in determining the position of
a point; and firstly, because geometry offers nothing more simple than a point,
we will examine what kind of considerations are involved if, to define the
position of a point, one refers it to a certain number of other points whose
positions are known; for the sake of clarity in this exposition, we will
designate these known points by the letters A, B, C, etc.
Suppose
that in defining the position of a point we say we begin with that it is one
metre from the point A.
Everyone
knows that it is a property of the sphere that every point on its surface is of
equal distance from its centre. Thus the definition given above satisfies this
property; that is, the point to be found could be any of those lying in the
surface of a sphere with centre at A and of radius one metre. The points on the
surface of this sphere are the only ones in all space which have this required
property, for all the points in space which are outside this sphere are further
than one methre from A and all those which are between the surface and the
centre are, contrariwise, nearer than one metre. Therefore, the points on the
surface of the sphere are the only ones which possess the property stated in
the proposition. Finally, therefore, this proposition expresses that the point
required is one of those on the surface of a sphere with centre A and radius
one metre. This makes the point distincitive from those in an infinity of other
places in space, surface, and other conditions are necessary if the required
point is to be recognised amongst them.
Suppose
that, in defining the position of this point, we say that it must also be two
metres from a second known point, B: it is clear that the reasoning for this
second condition is as for the first. The point must be one of those on the
surface of a sphere with centre at B and of radius two metres. This point,
finding itself simultaneously on the surfaces of two spheres, can only be
confused with those others which are common to the two spheres’ surfaces and
which lie in the spheres’ common intersection. Those who are familiar with
geometrical concepts will know that the intersection of two spherical surfaces
is the circumference of a ircle, whose centre lies on the straight line joining
the centres of the two spheres and whose plane is perpendicular to this line.
So by virtue of the two conditions stated together, the point searched for is
distinguished from those generally on the surfaces fo the two spheres and is
one lying on the circumference of the circle which only satisfies both
conditions. It is necessary therefore, to stipulate a third condition to
absolutely determine the required point.
Suppose,
finally, that this point must also be three metres from a third point C. This
third condition places the point amongst all those on the surface of a third
sphere with centre at C and of three metres radius: and because we have seen
that it must lie on the circumference of a circle of known position, to satisfy
also the third condition it must be one of the points common to the surface of
the third sphere and the circumference of the circle. But it is known that the
circumference of a circle and the surface of a sphere can only meet in two
points: therefore, by virtue of the three conditions, the point is
distinguished from all those in space and can only be one of the two points
found. If one further indicates on which side it lies of the plane passing
through the three centres of the spheres, i.e. points, A, B, and C, the point
is absolutely determined and cannot be confused with any other.
One sees
that determining the position of a point in space by referring it to known
points, of which the number is necessarily three, involves one in
considerations not simple enough for everyday use.
4. Let us see what will actually be the result if, instead of referring the position of a point to three other known points, it is referred to three lines of given position.
A line
need not be considered to be of finite length but can always be indefinitely
produced in one direction or the other. To simplify, we will label the lines we
will be obliged to use successively, A, B, C, etc.
If, in
defining the position of a point, we say that it must be found, for example, at
a distance of one metre from the first known line, A, we are saying that this
point is one of those in the surface of a cylinder of circular base with the
line A as axis and of radius one metre, and which is indefinitely produced in
both directions: for all the points on this surface possess the property stated
in the definition and are the only ones which possess it. In this way, the
point is distinguished from others in space which are outside or inside of the
cylinder, and it can only be confused with those in the surface of the
cylinder, amongst which one cannot distinguish it by means of the new
condition.
Suppose,
therefore, that the point sought is also to be placed at two metres from a
second line B, one sees likewise that one places this point on the surface of a
second cylinder, whose axis is in the line B and shoe radius is two metres. But
it is confused with all the other points on this cylinder surface if only this
second condition is considered. Through uniting these two conditions the point
must be simultaneously on the first cylindrical surface and on the second:
therefore, it can only be one of the common points of these two surfaces, i.e.
one at their common intersection. This line, on which the point must lie, has
the curvature of both the surfaces of the first and second cylinders and is, in
general, known as a curve of double curvature.
To
distinguish the point from all those on this line it is necessary to resort to
a third condition.
Suppose,
finally, that the definition states that the point must also be at three metres
from a third line C.
This new
condition states that it is one of those points on a third cylinder of which
the third line will be the axis and which will have a radius of three metres.
Therefore, in taking the three conditions together, the sought point can only
be one of those which are common to the third cylinder’s surface and to the
curve of double curvature – the intersection of the first two cylinders. But
this curve can be cut, in general, by the third cylindrical surface in eight
points, and amongst these the point can be distinguished by circumstances,
similar to those detailed in the previous case.
One sees
that the considerations for determining the position of a point in space by
recognition of its distances from three known straight lines are less simple
than those in which the distances are given from three points, and they are
thus less able to serve as a basic method for everyday use.
5. Among the simple objects which geometry considers, it is necessary to notice principally, first, the point which has no dimensions, secondly the line which has one, and thirdly the plane which has two. Let us investigate whether it is not more simple to determine the position of a point by recognising its distances from known planes, instead of using its distances from points or straight lines.
Suppose we
have non-parallel planes of known position in space, which we will designate
successively, A, B, C, D, etc.
If, in
defining the position of a point, we say it must be, for example, one metre
from the first plane A, without stating on which side of the plane, we are
saying that it must be one of those points on two planes parallel to A, placed
one either side of plane A, and both one metre from it, for all the points on both
these parallel planes satisfy the expressed condition and are, in all space,
the only ones which satisfy it.
To
distinguish amongst all the points of these two planes that which is in the
required position, it is necessary again to have recourse to other conditions.
Suppose,
secondly, that the point sought must be two metres from a second plane, B, then
one places it on two planes parallel to plane B, both at two metres distance,
and one on either side. To satisfy at the same time the two conditions it is
necessary that the point should be on one of the two planes parallel to plane A
and on one of the two planes parallel to plane B; consequently it is one of the
points in the common intersection of these four planes. But the intersection of
four planes of known position is a group of four straight lines equally of
known position. Therefore, in considering simultaneously both conditions, the
point is no longer confused with all those in space, neither likewise with all
those in the four planes, but only with those on four straight lines. Finally,
if the point must also be three metres from a third plane C, one expresses that
it must be on one of the two other planes parallel to C, placed one on either
side at three metres distance. So, by virtue of three conditions, it must be
simultaneously on one of the two last planes and on one of the four straight
lines. But as each of the two planes has a common point with each of the four
straight lines, there are eight points in space which satisfy the three conditions;
therefore, by these three conditions jointly the point required can only be one
of the eight determined points, and amongst these one can distinguish which by
means of particular circumstances.
For
example, if one indicates the distance of the point from the first plane A, one
expresses also in what sense, with respect to this plane, the distance is to be
taken; instead of two planes parallel to plane A, there is only one which needs
to be considered; it is that one which is situated on the side towards which
the distance is normally measured. Likewise, if one indicates the general sense
in which distances from the second plane are to be measured, the point is no
longer on the four lines of intersection of four parallel planes, but only on
the intersection of two planes, that is to say, on a straight line of known
position. Finally, if one indicates also the sense in which the point is placed
in relation to the third plane its position will in consequence be entirely
determined.
One can
see, therefore, that although the plane is an object less simple than the line
which has only one dimension and the point which has none, referring to planes
provides an easier system for the determination of points in space than to
points or lines. It is this procedure which we will ordinarily employ in the
application of algebra to geometry, or for finding the position of a point –
the principle of relating its distances to three planes of known position.
However,
in descriptive geometry, which has been pratised for a long time by a large
number of people and by many to whom time was precious, the process can again
be simplified and, instead of considering three planes, we find that, by means
of projections, we only have need for two of these.
6. The projection of a point on a plane may be defined as the foot of the perpendicular lowered form the point to the plane.
It follows
that if on two planes of known position in space one is given on each of these
planes the projection of the point whose position one wishes to define, this
point will be perfectly determined.
In effect,
if from the projection on the first plane one constructs a perpendicular to the
plane, it is evident that it will pass through the point defined. Likewise, if
from its projection on the second plane one constructs a perpendicular to the
plane, it also passes through the point defined. Therefore the point will be
simultaneously on two lines of known position in space; therefore it will be
uniquely at their intersection and is, accordingly, perfectly determined.
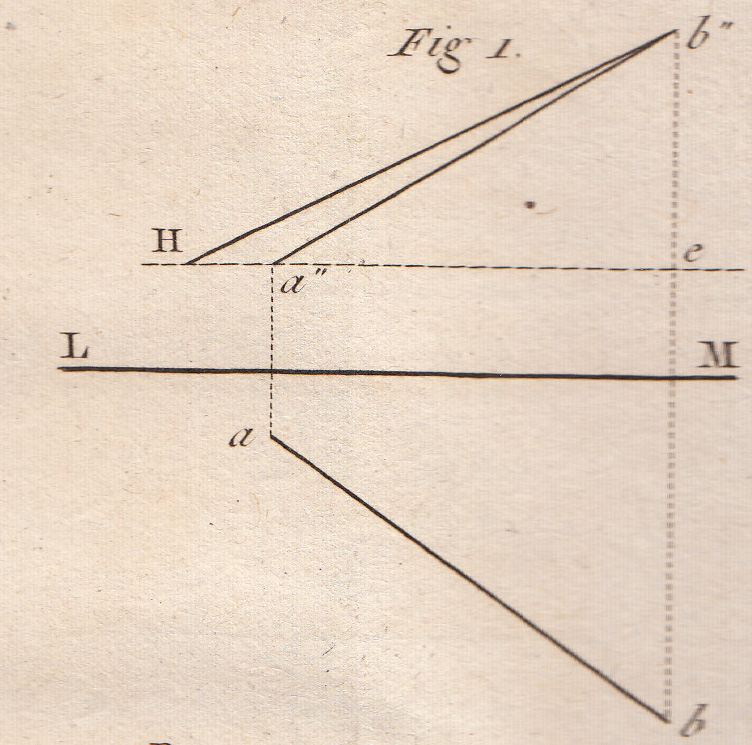
7.
Figure 1
If, from
all the points on a straight line of indefinite length, AB, oriented in any
direction in space, one can imagine perpendiculars dropped to a plane, LMNO, in
some given position, all the points at the meeting of these perpendicular with
the plane will lie on another straight line of indefinite length, ab; for they
will all lie in the plane passing through AB lying perpendicular to the plane
LMNO, and they will only be able to meet the latter at the common intersection
of two planes, which, as one knows, is a straight line.
The line
ab on the plan LMNO, which is formed by the projection of all the points from
another line AB, is called the projection of the line AB onto the plane.
Since two
points are sufficient to fix the position of a
straight line, to construct the projection of a straight line it is only
necessary to project these two points, the projection of the line passing
through the two points where the projectors meet the plane.
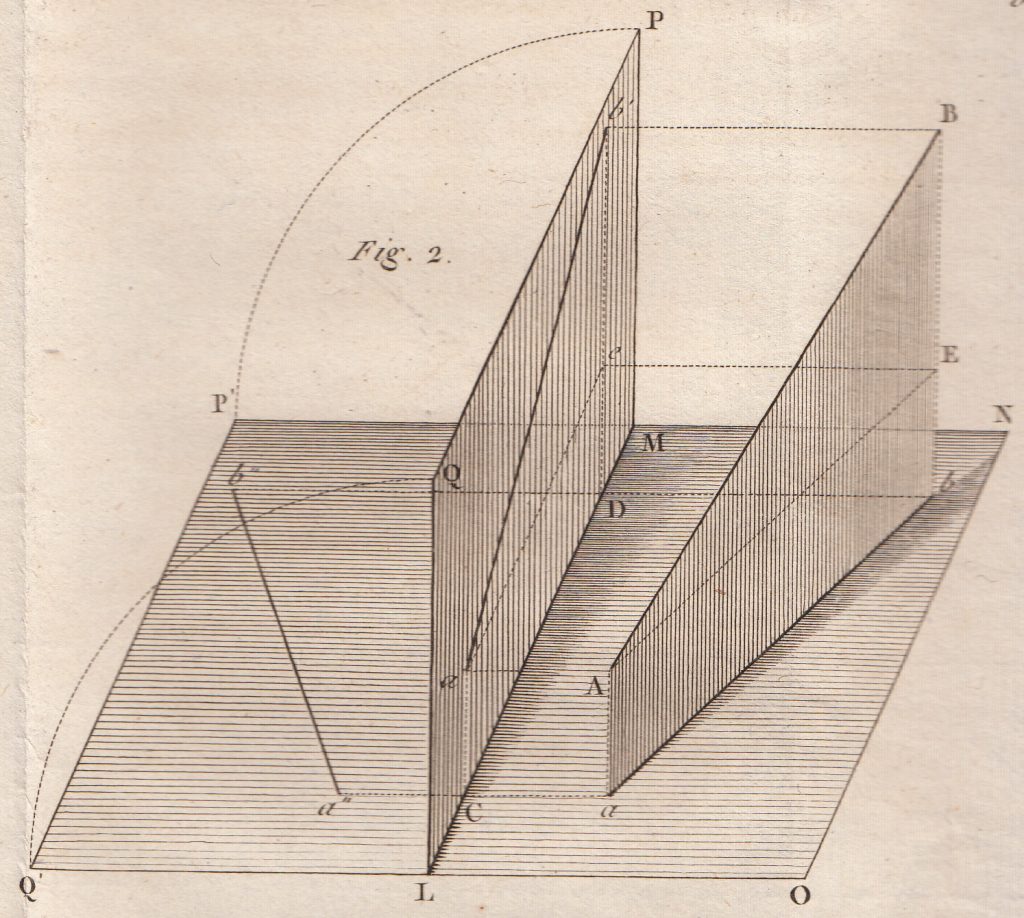
Figure 2
Being
given on two non-parallel planes LMNO and LMPQ, the projections ab and a’b’ of
the line AB, the projection of the line AB is fully determined; for if through
one of the projections ab one imagines a plane perpendicular to LMNO, this
plane of known position must necessarily pass through line AB; likewise, if
through the other projection a’b’ one imagines a plane perpendicular to LMPQ,
this plane of known position also passes through the line AB. The position of
this line, which is simultaneously on two known planes, is consequently at their
common intersection and its position is, therefore, absolutely determined.
8. What has been said above is independent of the position of the planes of projection and equally of the angle between the planes; but if the angle formed by the two planes of projection is very obtuse, the angle formed between the perpendiculars to these planes will be very acute, and any small drawing errors will cause considerable error in determining the position of the line AB. In order to avoid this cause of inaccuracy, unless it is otherwise necessary for ease of presentment, the planes of projection are always made to be perpendicular to one another. As the majority of draughtsmen who will practise this method are already familiar with the position of a horizontal plane and the direction of a plumbline, they will be quite used to supposing that of the two planes of projection, one is horizontal and the other vertical.
The need
for making the drawings of the two projections on a single sheet and for
carrying out the operation in the same area, again calls for the draughtsmen to
imagine that the vertical plane is turned about its intersection with the
horizontal plane, like a hinge, to lie flat in the horizontal plane and form
with it one continuous plane; and it is in this state that he will construct
his projections.
Thus the
vertical projection is always drawn in the horizontal plane and it is necessary
to imagine that it is raised up and put back into place by means of a quarter
revolution about the intersection of the horizontal and vertical planes. It is
necessary, accordingly, that this intersection line is made so that it can be
clearly seen on the drawing.
Thus, in
Fig. 2, the projection a’b’ of the line AB is not executed on a plane which is
really vertical; one imagines that the plane is turned about the axis LM to the
position LMP’Q’, and it is in this position of the plane that one carries out
the vertical projection a’’b’’.
Apart from
the ease of execution which this arrangement allows, it has also the advantage
of minimising the work of making projections. For instance, let us suppose that
the points a, a’ are the horizontal and vertical projections of point A; the
plane carried through the lines Aa, Aa’ will be at the same time perpendicular
to the two planes of projection, since it passes through lines which are
perpendicular to them; it will be then, also perpendicular to their common
intersection LM, and the lines aC, a’C, at which it cuts the two planes, will
be themselves perpendicular to LM.
But, when
the vertical plane is turned about LM as a hinge, the line a’C does not cease,
through this movement, to be perpendicular to LM, and it is still perpendicular
to it when the vertical plane is laid down to give the position Ca’’.
Therefore, the two lines aC, Ca’’, both passing through the point C and both
being perpendicular to LM, are in one straight line; it is the same with the
lines bD, Db’’ by resemblance to any other point such as B. From which it
follows that, if one has the horizontal projection of a point, the projection
of the same point on the vertical plane supposed laid down, will be in the line
taken through the horizontal projection perpendicular to the intersection, LM,
of the two planes of projection, and vice versa.
This
result is of very great use in practice.
9. Up to now we have considered the line AB (Fig. 1) to be of indefinite length, and we have occupied ourselves only with its direction; but it is possible for this line to be considered terminated by the two points, A and B, and one may need to know its length. We are going to see how one can deduce this from its two projections.
When a
straight line is parallel to one of the two planes upon which it is projected,
its length is equal to that of its projection on this plane; for the line and
its projection, being both terminated by two perpendiculars to the plane of
projection are parallel to each other and fall between parallel lines. Thus, in
this case the projection being given, the length of the line which is equal to
it is also given.
One knows
that a line is parallel to one of the two planes of projection when its
projection onto the other plane is parallel to the intersection of the two
planes.
If the
line is oblique to both of the two planes, its length is greater than that of
either of its projections, but may be deduced through a very simple
construction.
Fig. 2. Let AB be the straight line, whose two projections ab and a’b’ are given, and whose length is to be found. If through one of its extremities A, and in the vertical plane which passes through the line, one constructs a horizontal AE, produced as far as to meet at E the vertical dropped from the other extremity, one will form a right-angled triangle AEB, which is to be constructed to find the length of AB, the hypotenuse. But, in this triangle, as well as the right angle one knows the side AE, which is equal to the projection ab. Furthermore, if in the vertical plane one takes through the point a’ a horizontal a’e, which will be the projection of AE, it will cut the b’D in a point e, which will be the projection of point E. thus b’e will be the vertical projection of BE and will be, in consequence, of the same length. Therefore, knowing the two sides of the right-angled triangle, it may easily be constructed, and its hypotenuse will give the length of AB.
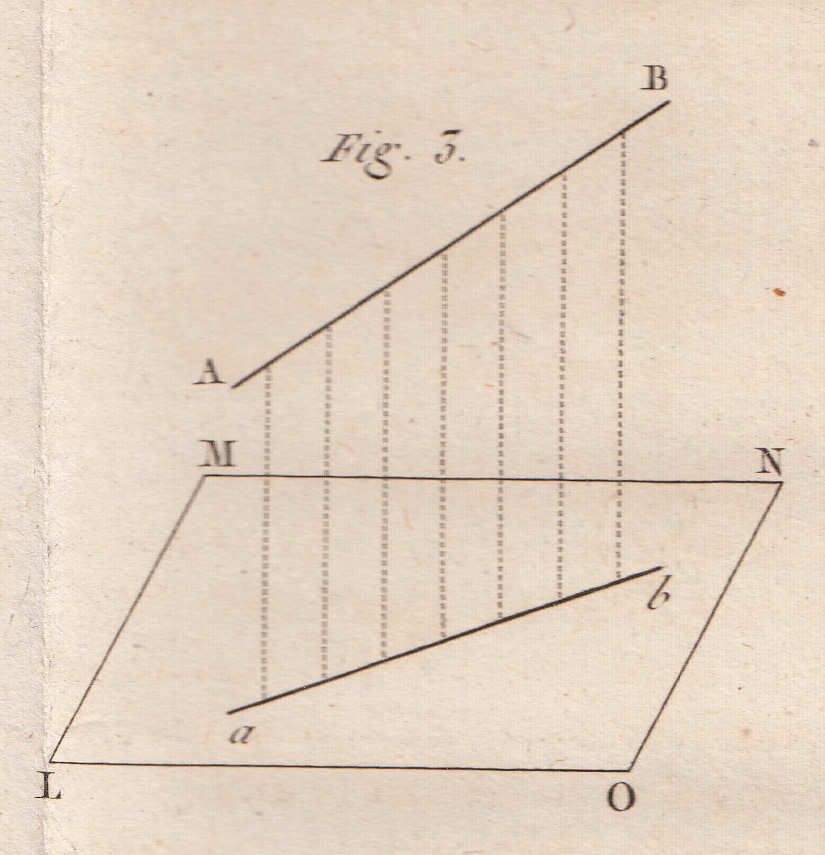
Fig. 2, being in perspective, has no resemblance to the construction used in the method of projections; we are here going to give the construction of this first question in all its simplicity.
Figure 3
Fig. 3. The line LM, being supposed to be the intersection of the two planes of projection, and the lines ab and a’’b’’ being the given projections of a straight line, to find the length of this line one takes through the point a’’ the horizontal He, which will cut the line bb’’ in a point e, and upon this horizontal one will transfer ab from e to H. One will then take the hypotenuse Hb’’ and the length of this hypotenuse will be that of the line required.
As the two
planes are at right angles, the operation which has been made on one of the
planes could just as well be made on the other and would give the same result.
After the above, one sees that if one has the two projections of a body terminated by plane faces, by rectilineal edges and by solid angles, the projections of which become a system of lines, it will be easy to find the length of any dimension one may wish; for such a dimension will be parallel to one of the two planes of projections or it will be oblique to both. In the first case the length required will be equal to its projection; in the second, one will deduce it from these two projections through the procedure described above.
1. Descriptive Geometry has two
objects: the first to give the methods for representing on a sheet of paper
which has but two dimensions, length and breadth, all the bodies of nature
which have three, length, breadth, and depth, provided that these bodies are
able to be rigorously defined.
The second
object is to give a means of knowing, through an exact description, the forms
of bodies and to deduce all the resulting truths from their forms and their
positions respectively.
We are going to indicate firstly the procedure, which has come to light through long experience, for fulfilling the first of these two objects. After this we shall give the methods for fulfilling the second.